







HD1715D-3 թմբուկային հորիզոնական եռաձիգ CNC հորատման մեքենա




| Պարամետրի անունը | Ապրանք | Պարամետրի արժեք |
| Նյութչափս | Թմբուկի տրամագծի միջակայքը | Φ780-Φ1700 մմ |
| Թմբուկի երկարության միջակայքը | 2-15 մ | |
| Մխոցի պատի առավելագույն հաստությունը | 50 մմ | |
| Առավելագույն քաշընյութ | 15Tօնս | |
| Առավելագույն հորատման տրամագիծը | Φ65 մմ | |
| Հորատման լիսեռԷլեկտրական ղեկավար | Քանակ | 3 |
| Առանցքի կոնաձևություն | № 6 Մորս | |
| Առանցքի արագությունը | 80-200 պտ/րոպե | |
| Սանդլի հարված | 500 մմ | |
| Առանցքի սնուցման արագությունը(Հիդրավլիկ անխափան) | 10-200 մմ/րոպե | |
| Առանցքային շարժիչի հզորություն | 3x7.5 կՎտ | |
| Լազերային հավասարեցման սարք | Կարգավորեք անցքերի խմբի դիրքը՝ ըստ եռակցման դիրքի | |
| Նյութպտտման արագություն | 0~2.8 պտ/րոպե | |
| Շարժական բեռնատարի շարժման արագությունը | 0~10 մ/րոպե | |
| Մխոցի կենտրոնի բարձրությունը գետնին | Մոտ 1570 մմ | |
| Մեքենայի չափսերը (երկարություն x լայնություն x բարձրություն) | Մոտավորապես 22x5x2.5մ | |
Այս մեքենան բաղկացած է մահճակալⅠ-ից, մահճակալⅡհետին հենարանից, չիպերի հեռացման և սառեցման համակարգից, հիդրավլիկ համակարգերից, էլեկտրական համակարգերից, լազերային հավասարեցման սարքերից և այլ բաղադրիչներից։

1. Այս մեքենայի թիվ 1 մահճակալը հիմնականում օգտագործվում է նյութեր տեղափոխելու համար: Մեքենայի գլխիկը և ոտքը հագեցած են հիդրավլիկ եռաձիգ սեղմակներով, որոնք կարող են իրականացնել թմբուկի ավտոմատ կենտրոնացումը և սեղմումը: Սեղմման տրամագիծը տատանվում է Φ780-ից մինչև Φ1700 մմ:
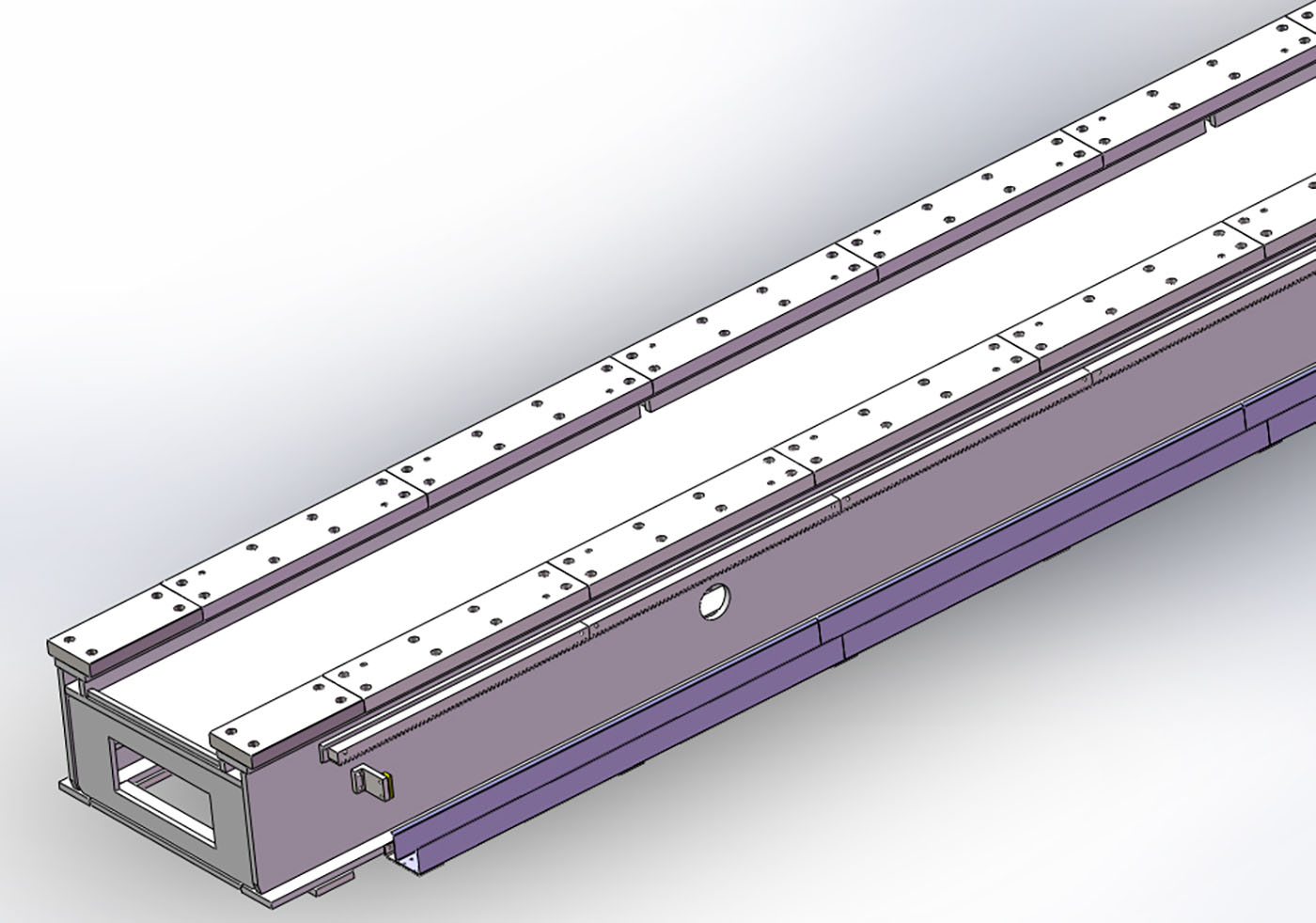
2. Այս մեքենայի երկրորդ մահճակալը հիմնականում օգտագործվում է հորատման գլխիկի երկայնական շարժումը կատարելու համար: Այս մեքենան ունի երեք անկախ հորատման գլխիկներ, որոնք համապատասխանաբար հենվում են երկայնական սահիկների և հիդրավլիկ սահիկների վրա՝ թիվ Ⅱ մահճակալի վրա երկայնական շարժվելու համար:
3. Հզոր գլխիկը կարող է իրականացնել ավտոմատ կառավարման հարվածը հիդրավլիկ սահող սեղանի միջոցով և իրականացնել արագ առաջ մատակարարման, աշխատանքի առաջ մատակարարման և արագ հետ մատակարարման ավտոմատ փոխակերպում: Անհպում անջատիչի բլոկի դիրքը կարգավորելով՝ կարելի է նաև ապահովել, որ երբ հորատման գլխիկը որոշակի հեռավորություն է դուրս գալիս հորատման ավարտին, այն ավտոմատ կերպով կանգ առնի: Երեք հզոր գլխիկները անկախ են և կարող են իրականացնել ավտոմատ հորատում՝ բարձր արդյունավետությամբ և լավ ճշգրտությամբ:

4. Մահճակալի գլխիկը ամրացված է մահճակալիⅠ մի ծայրում, և AC սերվոշարժիչը թվային կառավարման ինդեքսավորում է իրականացնում ռեդուկտորի և փոխանցման ռեդուկտորի միջոցով: Ինդեքսավորումն ավարտվելուց հետո ամրացման մեխանիզմը ավտոմատ կերպով հիդրավլիկ կերպով ամրացնում է առանցքի վրա տեղադրված արգելակային սկավառակը՝ առանցքի կայունությունն ու հուսալիությունն ապահովելու համար:
5. Այս մեքենայի առջևի և հետևի հենարանները կարող են իրականացնել ինքնակարգավորվող հիդրավլիկ ամբարձում թմբուկը սեղմելուց առաջ և հետո, ինչը բարելավում է թմբուկի հորատման կոշտությունը:

6. Այս մեքենան հագեցած է լազերային խաչաձև հավասարեցման սարքով, որը կարող է տեղադրվել առաջին հորատման գլխիկի իլիկի կոնաձև անցքում:
7. Նյութի CAD նկարները կարող են ուղղակիորեն մուտքագրվել, համակարգը ավտոմատ կերպով ստեղծում է մշակման ծրագիրը, և երեք առանցքները ավտոմատ կերպով բաշխում են բոլոր անցքերի մշակման առաջադրանքները:
8. Այս մեքենան ընդունում է Siemens թվային կառավարման համակարգը և ունի չորս թվային կառավարման առանցքներ՝ նյութի պտույտը և երեք հզորության գլուխների երկայնական շարժումը:
| ՈՉ։ | Ապրանք | Բրանկ | Ծագումը |
| 1 | Գծային ուղեցույցներ | ՀԻՎԻՆ/ՊՄԻ | Թայվան, Չինաստան |
| 2 | Ճշգրիտ ռեդուկտոր և ատամնավոր ու պինիոն զույգ | Ատլանտա | Գերմանիա |
| 3 | CNC համակարգ | Siemens 808D | Գերմանիա |
| 4 | Sէրվոշարժիչ | Սիմենս | Գերմանիա |
| 5 | Սահող շարժիչով սերվո շարժիչ և դրայվեր | Սիմենս | Գերմանիա |
| 6 | Հաճախականության փոխարկիչ | Սիմենս | Գերմանիա |
| 7 | Հիդրավլիկ պոմպ | Justmark | Թայվան, Չինաստան |
| 8 | Հիդրավլիկ փական | ATOS/Justmark | Իտալիա/Թայվան, Չինաստան |
| 9 | Քարշակման շղթա | Իգուս | Գերմանիա |
| 10 | Հիմնական էլեկտրական բաղադրիչներ, ինչպիսիք են կոճակները և ցուցիչները | Շնայդեր | Ֆրանչ |
Նշում. Վերը նշվածը մեր ստանդարտ մատակարարն է: Այն կարող է փոխարինվել նույն որակի այլ ապրանքանիշի բաղադրիչներով, եթե վերը նշված մատակարարը չկարողանա մատակարարել բաղադրիչները որևէ հատուկ խնդրի դեպքում:



Ընկերության համառոտ նկարագրություն  Գործարանի տեղեկատվություն
Գործարանի տեղեկատվություն  Տարեկան արտադրական հզորություն
Տարեկան արտադրական հզորություն  Առևտրային կարողություն
Առևտրային կարողություն 

